TD Methods - SARSAMAX (Q-Learning)
In monte carlo control methods, we had to wait for the episode to finish in order to make Q table updates. In temporal difference (TD) methods, we update the table as soon as the agent starts interacting with the environment (i.e every timestep)
Part 2: In this notebook, we will implement SARSAMAX (off-policy method) to estimate the optimal policy of CliffWalking gym environment. Sarsamax is also known as Q-Learning.
Part 1: SARSA | Part 3: EXPECTED SARSA
So, What is the difference between on-policy and off-policy methods?
On-policy methods use same policy (eps-greedy, that is used to evaluate and improve) to select agent’s action.
Off-policy methods use different (greedy) policy to select agent’s action, and it is different from policy (eps-greedy) that is evaluated and improved
Import Libraries
import gym
import sys
import numpy as np
import pandas as pd
from collections import defaultdict, deque
import matplotlib.pyplot as plt
plt.style.use('ggplot')
%matplotlib inline
Gym Environment
Create gym environment and explore state and action space
# simple environment with discrete state and action space
env = gym.make('CliffWalking-v0')
# Explore state and action space
print('State space: {}'.format(env.observation_space))
print('Action space: {}'.format(env.action_space))
State space: Discrete(48)
Action space: Discrete(4)
Let us see how well does the random player performs
# Random player: takes random action
env.reset()
score = 0
while True:
action = np.random.randint(env.action_space.n)
state, reward, done, info = env.step(action)
score += reward
if done:
print('last reward: {}, total score: {}'.format(reward, score))
break
last reward: -1, total score: -15071
We continue using epsilon-greedy policy (same as monte carlo implementation)
def eps_greedy(eps, Q, state, nA):
rand = np.random.rand()
if rand < eps:
return np.random.randint(nA)
else:
return np.argmax(Q[state])
SARSAMAX
Also known as Q-Learning
Update rule:
def update_sarsa_Q(alpha, gamma, Q, state, action, next_state=None):
next_action = np.argmax(Q[next_state])
Qsa = Q[next_state][next_action] if next_state is not None else 0
updated_q_value = Q[state][action] + alpha * (reward + gamma * Qsa - Q[state][action])
return updated_q_value
def generate_sarsa_episode(env, Q, eps, alpha, gamma):
nA = env.action_space.n
state = env.reset()
score = 0
while True:
action = eps_greedy(eps, Q, state, nA)
next_state, reward, done, info = env.step(action)
score += reward
if not done:
Q[state][action] = update_sarsa_Q(alpha, gamma, Q, state, action, next_state)
state = next_state
if done:
Q[state][action] = update_sarsa_Q(alpha, gamma, Q, state, action)
break
return Q, score
# Play for defined number of episodes
def train(env, num_episodes, eps=1.0, eps_min=0.01, eps_decay=0.9, alpha=0.01, gamma=1.0, plot_every=100):
Q = defaultdict(lambda: np.zeros(env.action_space.n))
print_every = int(0.1 * num_episodes)
print_every = print_every if print_every > 0 else 1
all_rewards = []
tmp_rewards = deque(maxlen=plot_every)
avg_rewards = deque(maxlen=num_episodes)
for i in range(1, num_episodes + 1):
eps = max(eps * eps_decay, eps_min)
Q, score = generate_sarsa_episode(env, Q, eps, alpha, gamma)
all_rewards.append(score)
tmp_rewards.append(score)
if i % print_every == 0:
print('\rProgress: {}/{}, average: {}'.format(i, num_episodes, np.mean(score)), end='')
sys.stdout.flush()
if i % plot_every == 0:
avg_rewards.append(np.mean(tmp_rewards))
return Q, all_rewards, avg_rewards
Train the agent and try to recover optimal policy (or near optimal)
# Hyperparameters (RL is very susceptible to hyperparams)
eps = 1.0 # starting epsilon
eps_min = 0.01 # minimum epsilon
eps_decay = 0.9 # decay rate
alpha = 0.01 # Q value update step size
gamma = 1.0 # discount factor
Q_sarsa, score, avg_score = train(env, 5000, eps=eps, eps_min=eps_min, eps_decay=eps_decay, alpha=alpha, gamma=gamma)
Progress: 5000/5000, average: -13.0
Visualise
policy = np.array([np.argmax(Q_sarsa[key]) if key in Q_sarsa else -1 for key in np.arange(12*4)])
# UP: 0, RIGHT: 1, DOWN: 2, LEFT: 3, N/A: -1
# Display policy
policy.reshape(4, 12)
array([[ 0, 0, 1, 1, 1, 1, 1, 0, 1, 2, 1, 2],
[ 0, 1, 1, 1, 2, 1, 1, 2, 1, 2, 1, 2],
[ 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2],
[ 0, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1]])
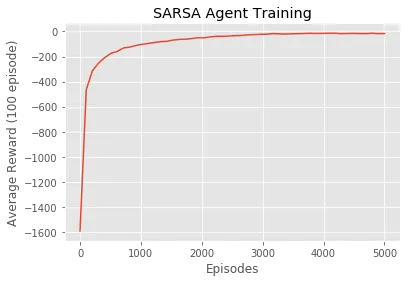
Plot average rewards over the total number of episodes
plt.plot(np.linspace(0, 5000, len(avg_score)), np.asarray(avg_score))
plt.xlabel('Episodes')
plt.ylabel('Average Reward (100 episode)')
plt.title('SARSA Agent Training')
plt.show()
Try it out
# Use policy to play
state = env.reset()
score = 0
while True:
action = np.argmax(Q_sarsa[state])
state, reward, done, info = env.step(action)
score += reward
if done:
print('last reward: {}, total score: {}'.format(reward, score))
break
last reward: -1, total score: -13