Monte Carlo Control Methods
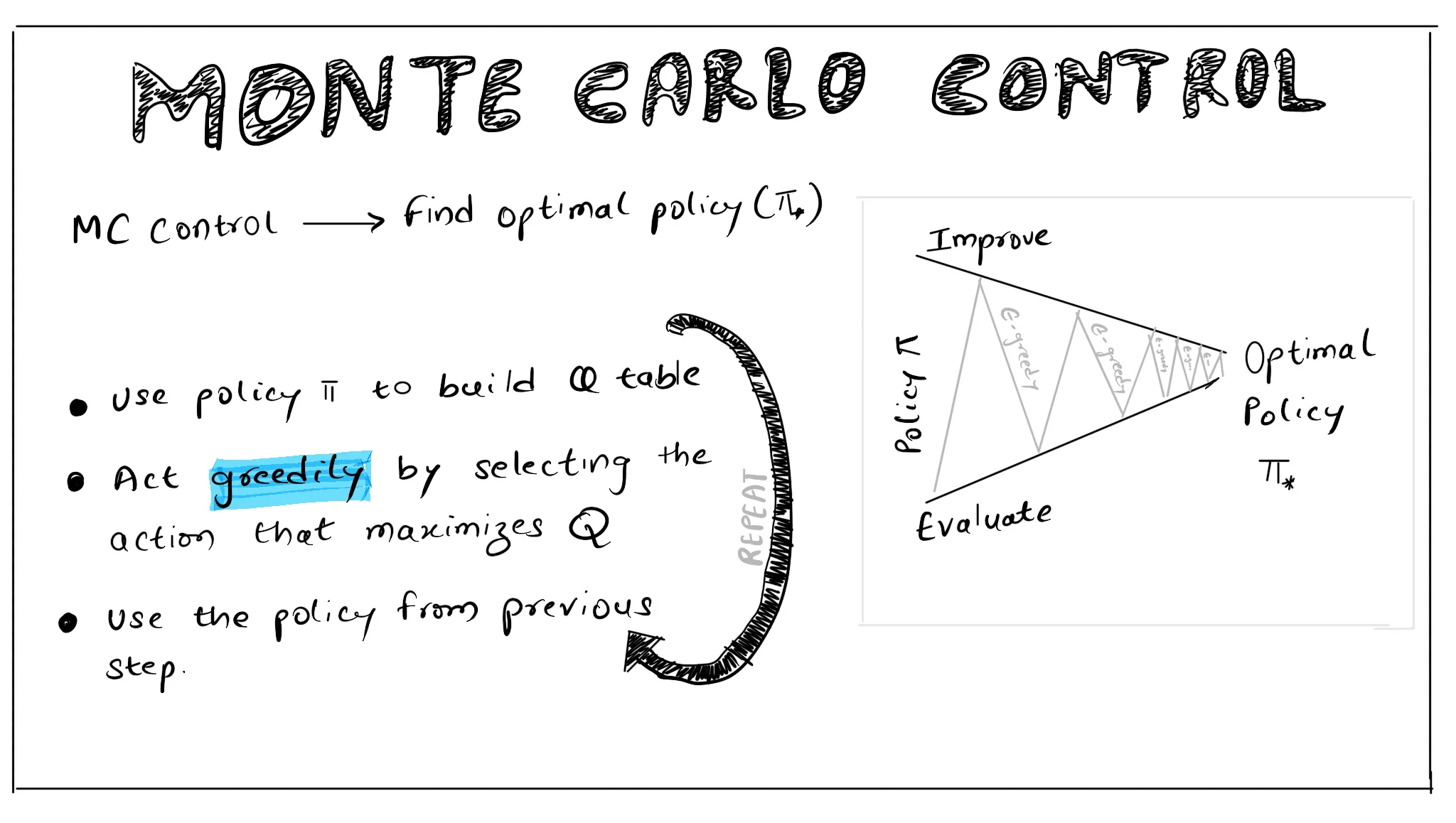
In this notebook, we cover Monte Carlo control methods where our task is to find the optimal policy to solve Black Jack.
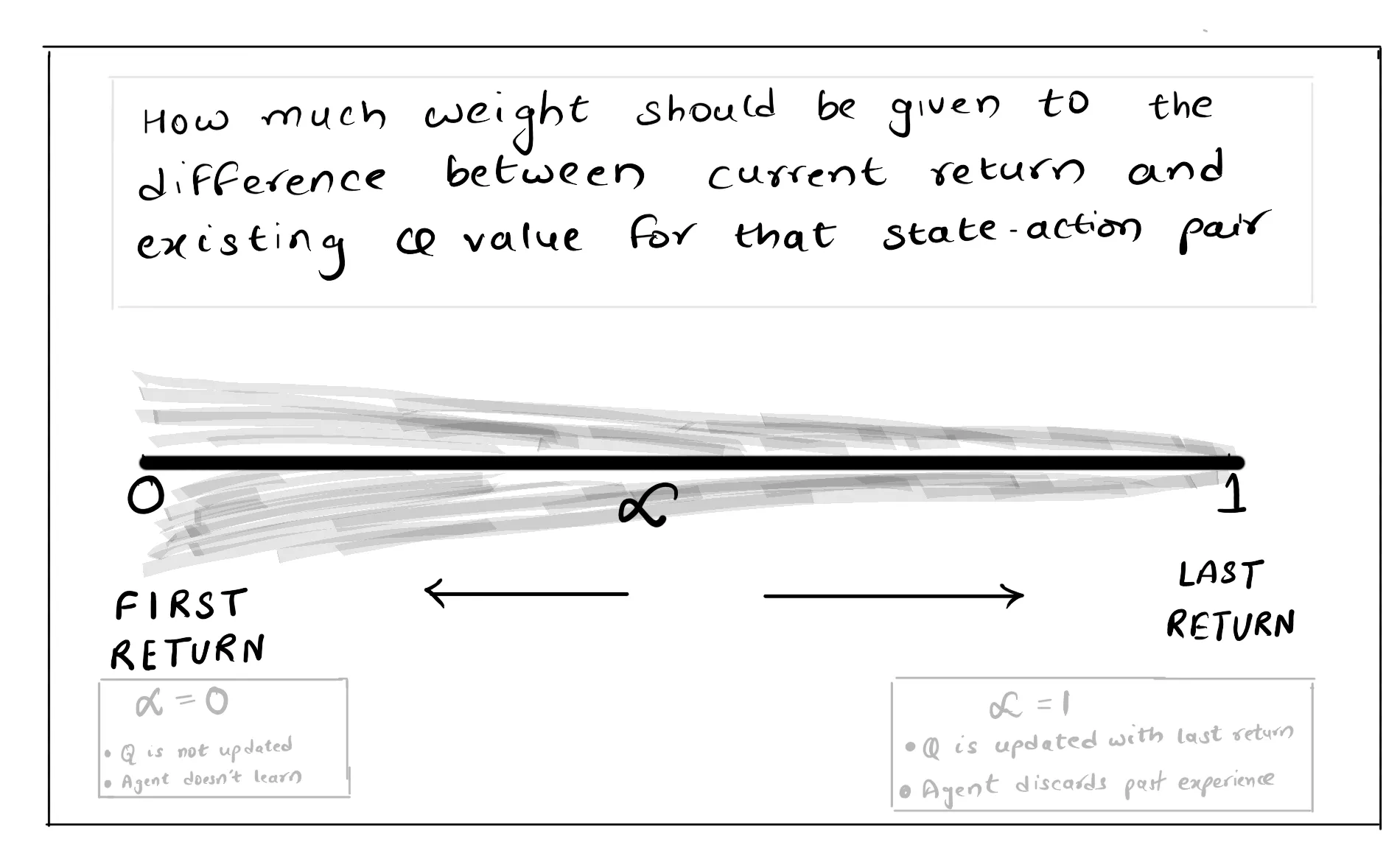
A Cartoon image of Monte Carlo Control:
See Also
- Temporal Difference Methods ➡️ Part 1: SARSA | Part 2: SARSAMAX | Part 3: EXPECTED SARSA
Import Libraries
import sys
from collections import defaultdict, deque
import numpy as np
import matplotlib.pyplot as plt
import gym
from plot_utils import plot_blackjack_values, plot_policy
Create Gym Environment
# env = gym.make('FrozenLake8x8-v0')
env = gym.make('Blackjack-v0')
print('state space: {}'.format(env.observation_space))
print('action space: {}'.format(env.action_space))
state space: Tuple(Discrete(32), Discrete(11), Discrete(2))
action space: Discrete(2)
state = env.reset()
while True:
action = env.action_space.sample()
next_state, reward, done, info = env.step(action)
if done:
print(reward)
break
Explore-Exploit Dilemma
If the agent chooses to only explore the environment, then it will not learn anything and if it only chooses to exploit, it will learn a sub-optimal policy because it wouldn’t see states that could lead to better policies.
EPSILON-GREEDY
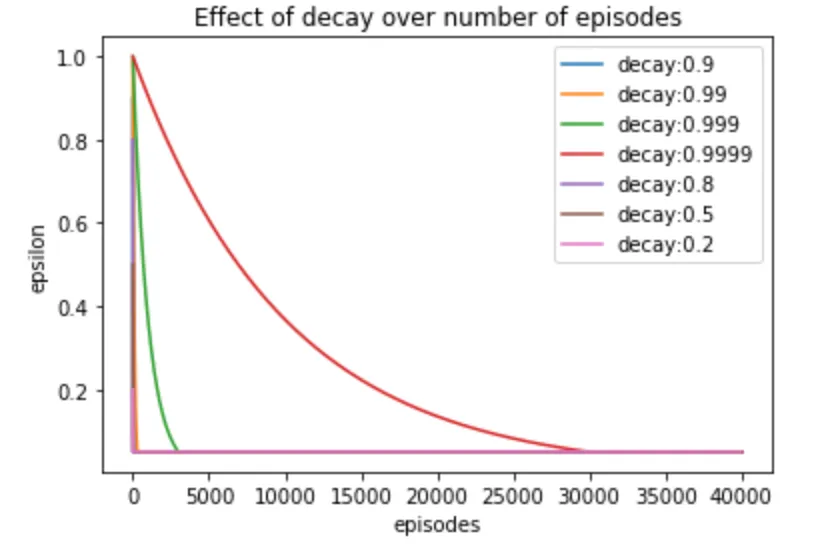
We use epsilon-greedy policy to allow agent do a lot more exploration for initial episodes and, as the agent collects more experience, we decay eps (epsilon) to reduce exploration and increase exploitation. For eps probability, we select action uniformly at random (explore) and for 1-eps probability, we select action that maximises the Q (exploit).
First-Visit Incremental Implementation (W=1)
action-values are estimated after each episode instead of waiting for all episodes to finish.
def eps_greedy(env, eps, state, Q):
rnd = np.random.randn()
if state in Q:
if rnd < eps:
action = env.action_space.sample()
else:
action = np.argmax(Q[state])
else:
action = env.action_space.sample()
return action
def generate_episode(env, Q, eps):
state = env.reset()
episode = []
while True:
action = eps_greedy(env, eps, state, Q)
next_state, reward, done, info = env.step(action)
episode.append((state, action, reward))
state = next_state
if done:
break
return episode
def first_visit_mc_control_incremental(env, num_episodes, eps=1.0, eps_decay=0.9999, min_eps=0.05, gamma=1.0):
nA = env.action_space.n
Q = defaultdict(lambda: np.zeros(nA))
N = defaultdict(lambda: np.zeros(nA))
eps = 1.0
for i in range(1, num_episodes+1):
if i % 1000 == 0:
print('\rProgress: {}/{}'.format(i, num_episodes), end="")
sys.stdout.flush()
eps = max(eps * eps_decay, min_eps)
# Generate episopde
episode = generate_episode(env, Q, eps)
# Update Q values
states, actions, rewards = zip(*episode)
discounts = np.array([gamma ** i for i in range(len(rewards) + 1)])
N_i = defaultdict(lambda: np.zeros(nA))
for idx, state in enumerate(states):
action = actions[idx]
if N_i[state][action] == 0:
N_i[state][action] = 1
N[state][action] += 1
G = sum(rewards[idx:] * discounts[:-(idx+1)])
Q[state][action] += 1/N[state][action] * (G - Q[state][action])
policy = {state:np.argmax(actions) for state, actions in Q.items()}
return policy, Q
policy, Q = first_visit_mc_control_incremental(env, 500000)
Progress: 500000/500000
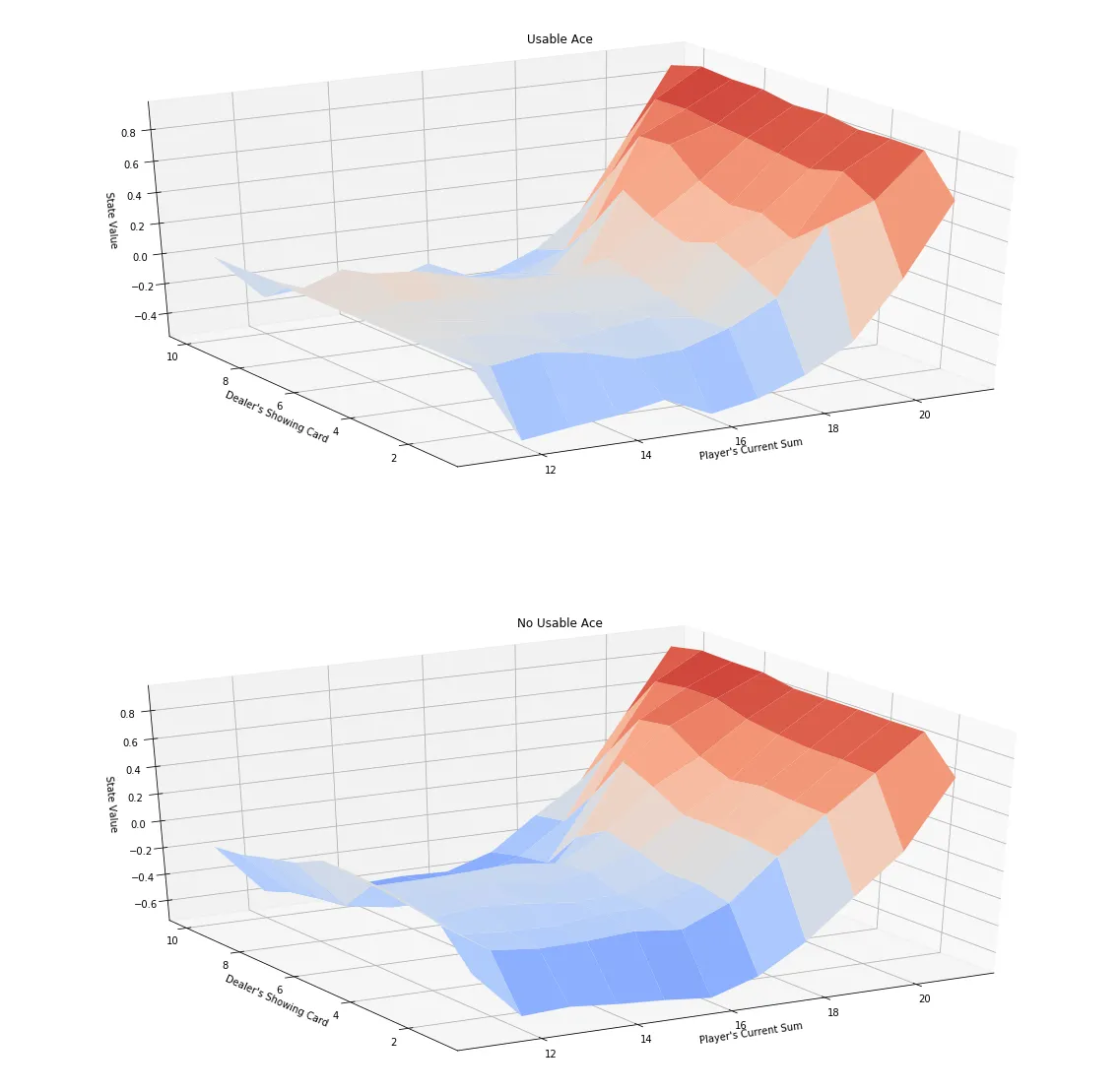
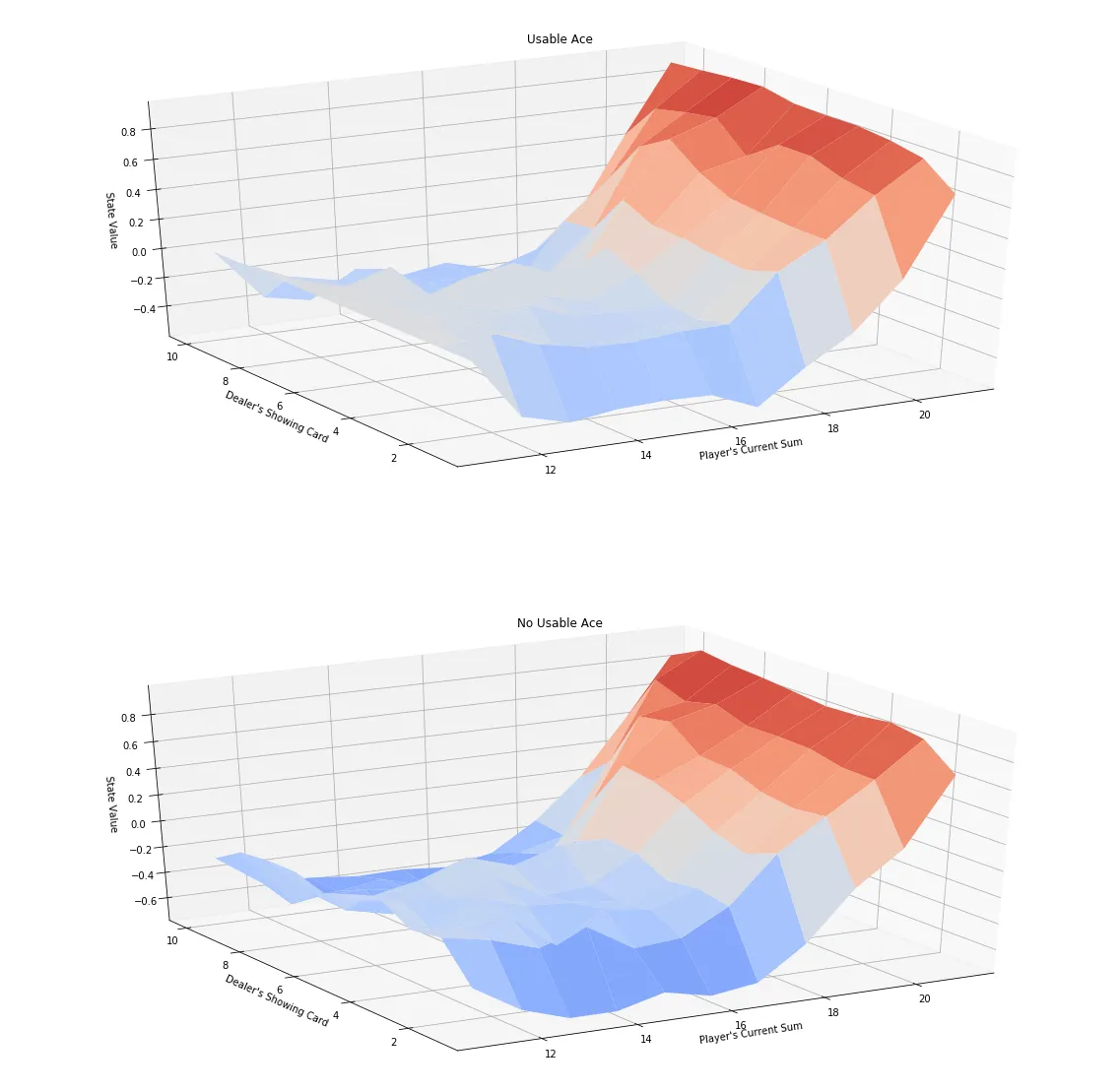
# obtain the corresponding state-value function
V_to_plot = {state: np.max(actions) for state, actions in Q.items()}
# plot the state-value function
plot_blackjack_values(V_to_plot)
Every-Visit Incremental
def every_visit_mc_control_incremental(env, num_episodes, eps=1.0, eps_decay=0.9999, min_eps=0.05, gamma=1.0):
nA = env.action_space.n
Q = defaultdict(lambda: np.zeros(nA))
N = defaultdict(lambda: np.zeros(nA))
eps = 1.0
for i in range(1, num_episodes+1):
if i % 1000 == 0:
print('\rProgress: {}/{}'.format(i, num_episodes), end="")
sys.stdout.flush()
eps = max(eps * eps_decay, min_eps)
# Generate epispde
episode = generate_episode(env, Q, eps)
# Update Q values
states, actions, rewards = zip(*episode)
discounts = np.array([gamma ** i for i in range(len(rewards) + 1)])
for idx, state in enumerate(states):
action = actions[idx]
N[state][action] += 1
G = sum(rewards[idx:] * discounts[:-(idx+1)])
Q[state][action] += 1/N[state][action] * (G - Q[state][action])
policy = {state:np.argmax(actions) for state, actions in Q.items()}
return policy, Q
policy, Q = every_visit_mc_control_incremental(env, 500000)
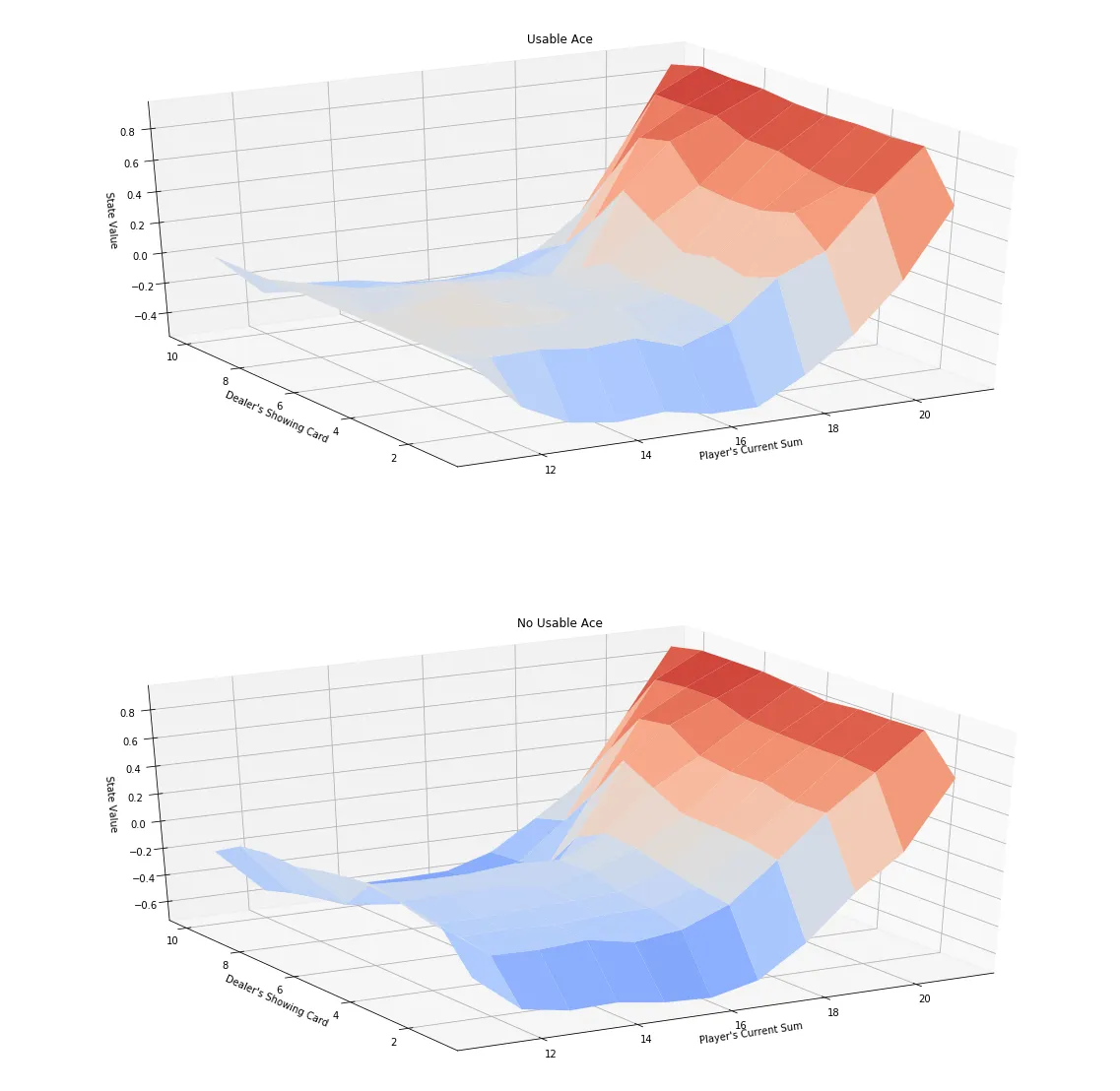
# obtain the corresponding state-value function
V_to_plot = {state: np.max(actions) for state, actions in Q.items()}
# plot the state-value function
plot_blackjack_values(V_to_plot)
Progress: 500000/500000
Constant - α
With constant-alpha, we introduce another hyperparameter to choose how much weight should be given to the recent returns.
First-Visit constant - α
def first_visit_mc_control_const_alpha(env, num_episodes, eps=1.0, eps_decay=0.9999, eps_min=0.5, alpha=0.01, gamma=1.0):
nA = env.action_space.n
Q = defaultdict(lambda: np.zeros(nA))
for i in range(num_episodes):
if i % 1000 == 0:
print('\rProgress:{}/{}'.format(i, num_episodes), end="")
sys.stdout.flush()
eps = max(eps * eps_decay, eps_min)
episodes = generate_episode(env, Q, eps)
# Update Q values
states, actions, rewards = zip(*episodes)
discounts = np.array([gamma ** i for i in range(len(rewards) + 1)])
N_i = defaultdict(lambda: np.zeros(nA))
for idx, state in enumerate(states):
action = actions[idx]
if N_i[state][action] == 0:
N_i[state][action] = 1
G = sum(rewards[idx:] * discounts[:-(idx+1)])
Q[state][action] += alpha * (G - Q[state][action])
policy = {state:np.argmax(actions) for state, actions in Q.items()}
return policy, Q
policy, Q = first_visit_mc_control_const_alpha(env, 500000)
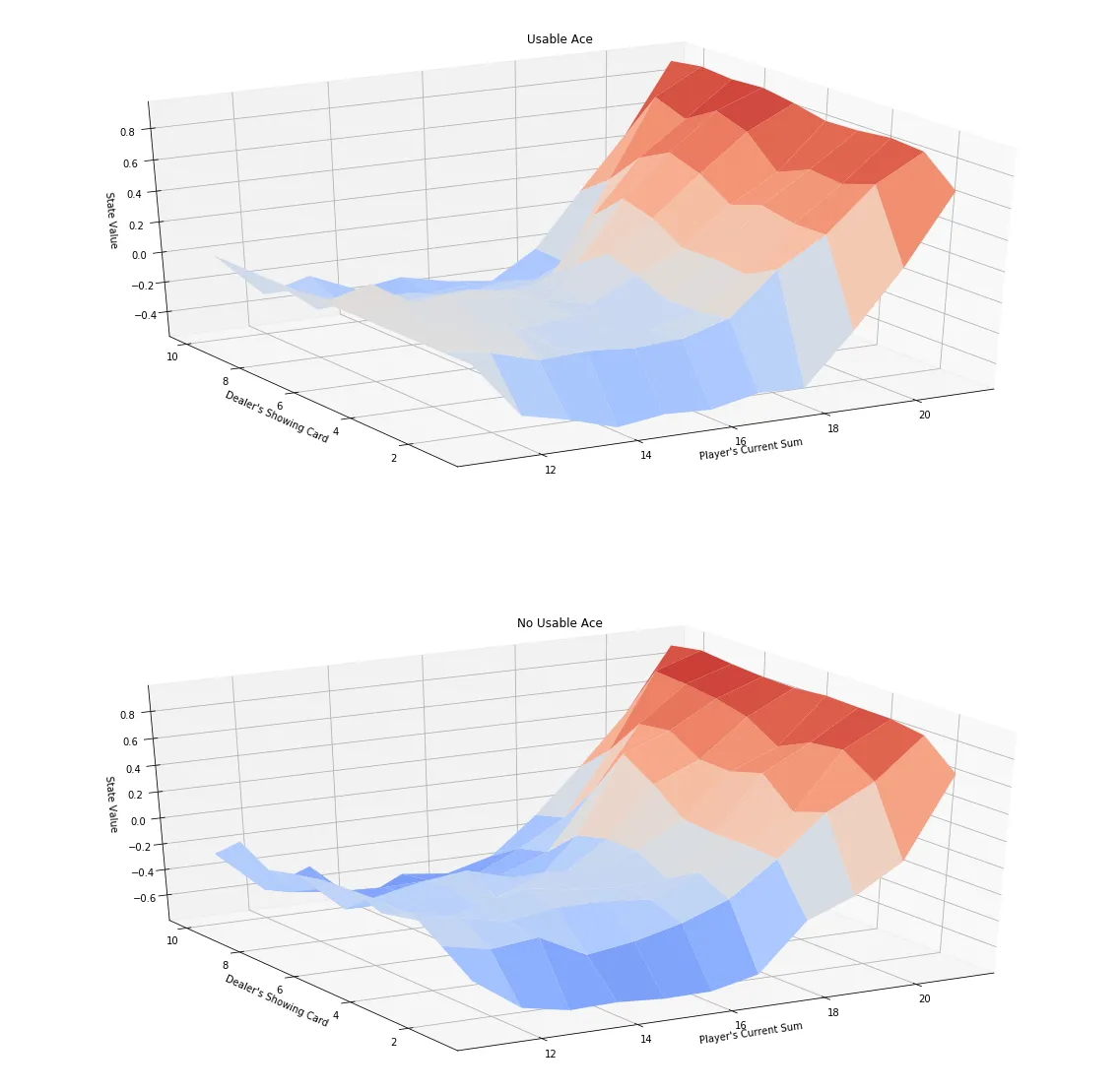
# obtain the corresponding state-value function
V_to_plot = {state: np.max(actions) for state, actions in Q.items()}
# plot the state-value function
plot_blackjack_values(V_to_plot)
Progress:499000\500000
Every-Visit constant - α
def every_visit_mc_control_const_alpha(env, num_episodes, eps=1.0, eps_decay=0.99999, eps_min=0.5, alpha=0.01, gamma=1.0):
nA = env.action_space.n
Q = defaultdict(lambda: np.zeros(nA))
for i in range(num_episodes):
if i % 1000 == 0:
print('\rProgress:{}/{}'.format(i, num_episodes), end="")
sys.stdout.flush()
eps = max(eps * eps_decay, eps_min)
episodes = generate_episode(env, Q, eps)
# Update Q values
states, actions, rewards = zip(*episodes)
discounts = np.array([gamma ** i for i in range(len(rewards) + 1)])
for idx, state in enumerate(states):
action = actions[idx]
G = sum(rewards[idx:] * discounts[:-(idx+1)])
Q[state][action] += alpha * (G - Q[state][action])
policy = {state:np.argmax(actions) for state, actions in Q.items()}
return policy, Q
policy, Q = every_visit_mc_control_const_alpha(env, 500000)
# obtain the corresponding state-value function
V_to_plot = {state: np.max(actions) for state, actions in Q.items()}
# plot the state-value function
plot_blackjack_values(V_to_plot)
Progress:499000/500000
See Also
- Temporal Difference Methods ➡️ Part 1: SARSA | Part 2: SARSAMAX | Part 3: EXPECTED SARSA